2026
Teaching Small Models When Not to Call Functions: Structured Reasoning for Tool Refusal in Low-Resource Languages
Dung Pham Tuan Vo*, Thai Trung Tran*, Tushar Semwal (* equal contribution)
ACM SIGIR 2026 (Main Track) 2026 Rank A*
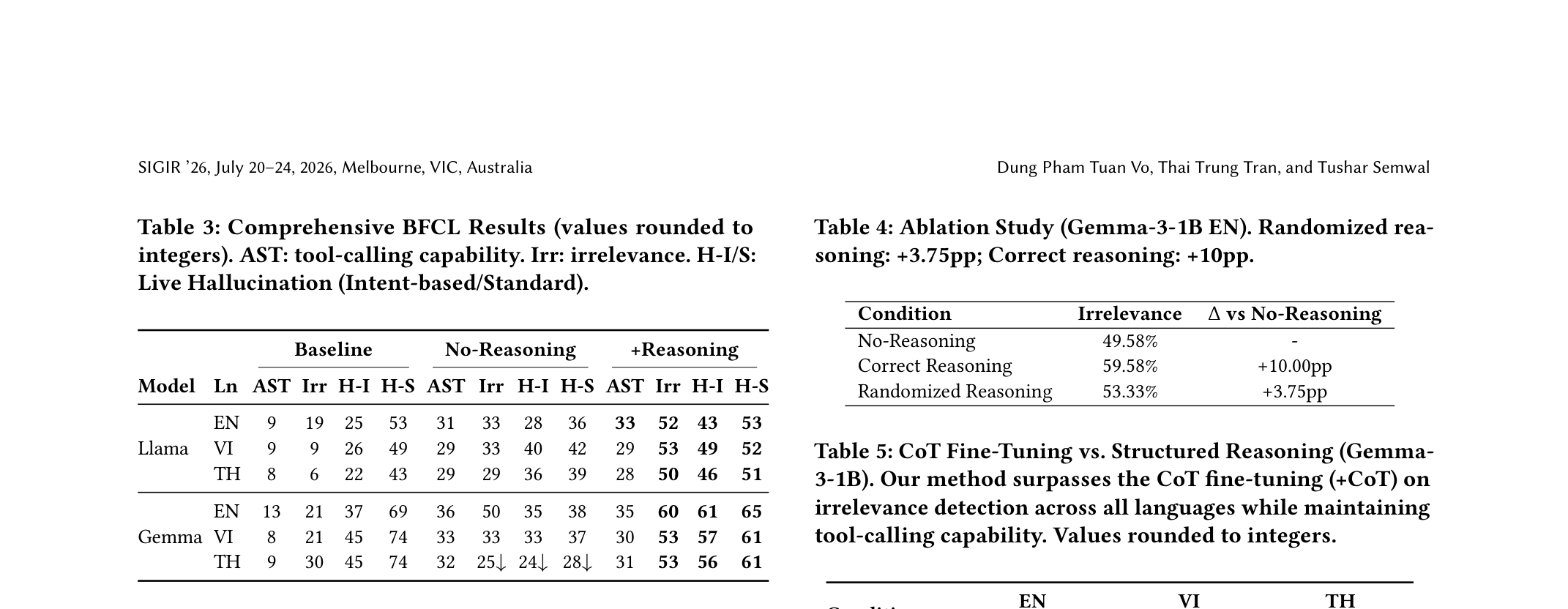
Standard fine-tuning teaches models how to call tools — not when not to. In low-resource languages (Vietnamese, Thai) on 1B-parameter models, this causes catastrophic hallucination (−21pp on Gemma-Thai). We fix it with structured key-value reasoning forms that make the refusal decision explicit at training time, improving irrelevance detection and hallucination by +10–30pp and slashing hallucination probability 50–60× (from 67–76% down to 1.2–1.3%) — at 1.9× lower token cost than chain-of-thought. Published at SIGIR '26, Melbourne.
Teaching Small Models When Not to Call Functions: Structured Reasoning for Tool Refusal in Low-Resource Languages
Dung Pham Tuan Vo*, Thai Trung Tran*, Tushar Semwal (* equal contribution)
ACM SIGIR 2026 (Main Track) 2026 Rank A*
Standard fine-tuning teaches models how to call tools — not when not to. In low-resource languages (Vietnamese, Thai) on 1B-parameter models, this causes catastrophic hallucination (−21pp on Gemma-Thai). We fix it with structured key-value reasoning forms that make the refusal decision explicit at training time, improving irrelevance detection and hallucination by +10–30pp and slashing hallucination probability 50–60× (from 67–76% down to 1.2–1.3%) — at 1.9× lower token cost than chain-of-thought. Published at SIGIR '26, Melbourne.
2021

Tweeting about Twenty: An Analysis of Interest, Public Sentiments and Opinion about 20mph Speed Restrictions in Two UK Cities
Tushar Semwal, Karen Milton, Ruth Jepson, Mark P. Kelly
BMC Public Health 2021 10 citations
Uses Twitter data and NLP to analyze public sentiment around 20mph speed restrictions in Edinburgh and Belfast. Funded by a Wellcome Trust grant. Demonstrates practical application of social NLP for public health and policy insight.
Tweeting about Twenty: An Analysis of Interest, Public Sentiments and Opinion about 20mph Speed Restrictions in Two UK Cities
Tushar Semwal, Karen Milton, Ruth Jepson, Mark P. Kelly
BMC Public Health 2021 10 citations
Uses Twitter data and NLP to analyze public sentiment around 20mph speed restrictions in Edinburgh and Belfast. Funded by a Wellcome Trust grant. Demonstrates practical application of social NLP for public health and policy insight.
FedPerf: A Practitioners' Guide to Performance of Federated Learning Algorithms
Ajinkya Mulay, Baye Gaspard, Rakshit Naidu, Santiago Gonzalez-Toral, Vineeth S, Tushar Semwal, Ayush Manish Agrawal
Proceedings of Machine Learning Research (PMLR 148), NeurIPS 2020 Preregistration Workshop 2021 12 citations
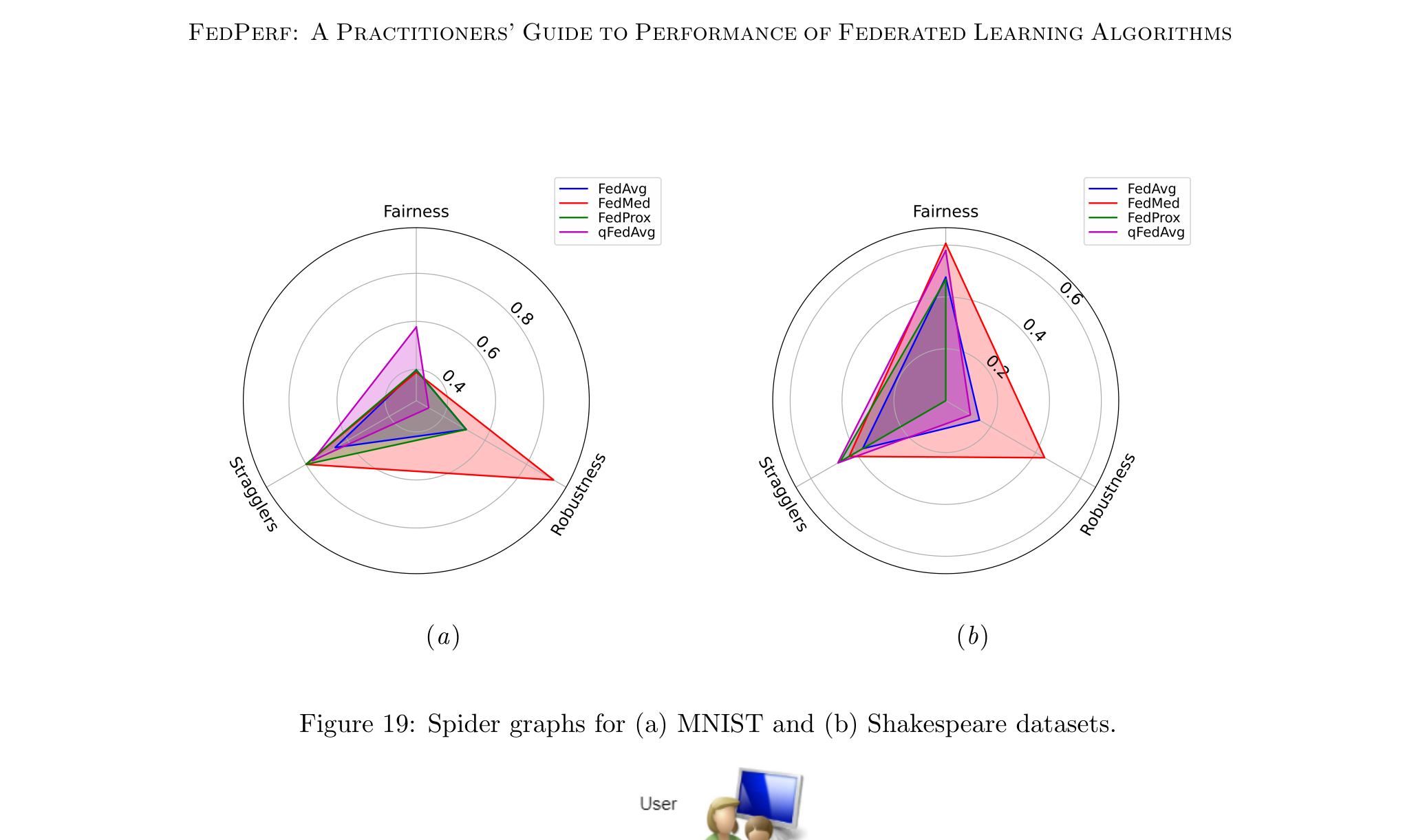
Which federated learning algorithm should you actually deploy? FedAvg, FedProx, FedMed, and qFedAvg all look similar on accuracy — but diverge dramatically when your data is skewed, nodes drop out, or fairness across clients matters. This large-scale empirical study benchmarks them across all three dimensions simultaneously using spider charts, giving practitioners a single diagnostic view to pick the right algorithm for their constraints. Published in PMLR 148, 2021.
FedPerf: A Practitioners' Guide to Performance of Federated Learning Algorithms
Ajinkya Mulay, Baye Gaspard, Rakshit Naidu, Santiago Gonzalez-Toral, Vineeth S, Tushar Semwal, Ayush Manish Agrawal
Proceedings of Machine Learning Research (PMLR 148), NeurIPS 2020 Preregistration Workshop 2021 12 citations
Which federated learning algorithm should you actually deploy? FedAvg, FedProx, FedMed, and qFedAvg all look similar on accuracy — but diverge dramatically when your data is skewed, nodes drop out, or fairness across clients matters. This large-scale empirical study benchmarks them across all three dimensions simultaneously using spider charts, giving practitioners a single diagnostic view to pick the right algorithm for their constraints. Published in PMLR 148, 2021.
2020
Selective Federated Transfer Learning using Representation Similarity
Tushar Semwal, Haofan Wang, Chinnakotla Krishna Teja Reddy
NeurIPS 2020 Workshop on Scalable, Privacy-preserving and Federated Learning (SpicyFL) 2020
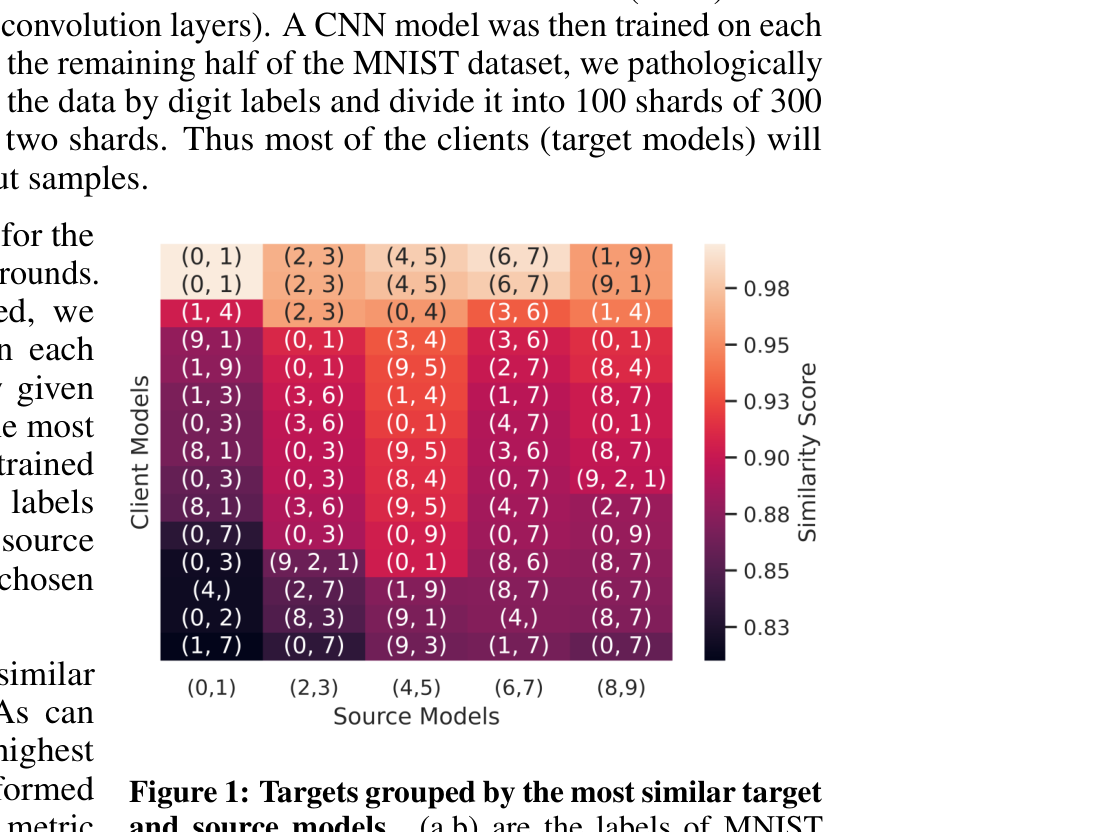
In federated learning you can't see client data — so how do you pick the right pretrained model to transfer? We use Centered Kernel Alignment (CKA) with sketching to compare model representations locally on-device, then run a federated voting algorithm to select the best source model without sharing any raw data. Cuts communication rounds up to 5× versus FedAvg baseline.
Selective Federated Transfer Learning using Representation Similarity
Tushar Semwal, Haofan Wang, Chinnakotla Krishna Teja Reddy
NeurIPS 2020 Workshop on Scalable, Privacy-preserving and Federated Learning (SpicyFL) 2020
In federated learning you can't see client data — so how do you pick the right pretrained model to transfer? We use Centered Kernel Alignment (CKA) with sketching to compare model representations locally on-device, then run a federated voting algorithm to select the best source model without sharing any raw data. Cuts communication rounds up to 5× versus FedAvg baseline.

Robots in the Danger Zone: Exploring Public Perception through Engagement
David A. Robb, Mohammad I. Ahmad, C. Tiseo, S. Aracri, A. C. McConnell, V. Page, Tushar Semwal, et al.
ACM/IEEE International Conference on Human-Robot Interaction (HRI) 2020 30 citations
Investigates public perception of robots operating in hazardous environments through an interactive engagement study. Findings reveal nuanced attitudes toward robot autonomy, safety, and societal trust in high-risk deployment contexts.
Robots in the Danger Zone: Exploring Public Perception through Engagement
David A. Robb, Mohammad I. Ahmad, C. Tiseo, S. Aracri, A. C. McConnell, V. Page, Tushar Semwal, et al.
ACM/IEEE International Conference on Human-Robot Interaction (HRI) 2020 30 citations
Investigates public perception of robots operating in hazardous environments through an interactive engagement study. Findings reveal nuanced attitudes toward robot autonomy, safety, and societal trust in high-risk deployment contexts.

A Decentralized Artificial Immune System for Solution Selection in Cyber–Physical Systems
Tushar Semwal, Sumit Bose Nair
Applied Soft Computing 2020 21 citations
Presents a decentralized, immune-inspired mechanism for selecting among competing solutions in cyber-physical systems. The approach enables distributed agents to reach consensus on action selection without central coordination, evaluated on multi-robot environments.
A Decentralized Artificial Immune System for Solution Selection in Cyber–Physical Systems
Tushar Semwal, Sumit Bose Nair
Applied Soft Computing 2020 21 citations
Presents a decentralized, immune-inspired mechanism for selecting among competing solutions in cyber-physical systems. The approach enables distributed agents to reach consensus on action selection without central coordination, evaluated on multi-robot environments.
2018
On an Immuno-inspired Distributed, Embodied Action-Evolution cum Selection Algorithm
Tushar Semwal, D. D. Kulkarni, Sumit Bose Nair
Proceedings of the Genetic and Evolutionary Computation Conference (GECCO) 2018 5 citations
Proposes an immune-system-inspired distributed algorithm for action-evolution and selection in embodied multi-robot systems. Agents evolve and select behavioral policies through a decentralized clonal selection mechanism, validated on real robotic hardware.
On an Immuno-inspired Distributed, Embodied Action-Evolution cum Selection Algorithm
Tushar Semwal, D. D. Kulkarni, Sumit Bose Nair
Proceedings of the Genetic and Evolutionary Computation Conference (GECCO) 2018 5 citations
Proposes an immune-system-inspired distributed algorithm for action-evolution and selection in embodied multi-robot systems. Agents evolve and select behavioral policies through a decentralized clonal selection mechanism, validated on real robotic hardware.
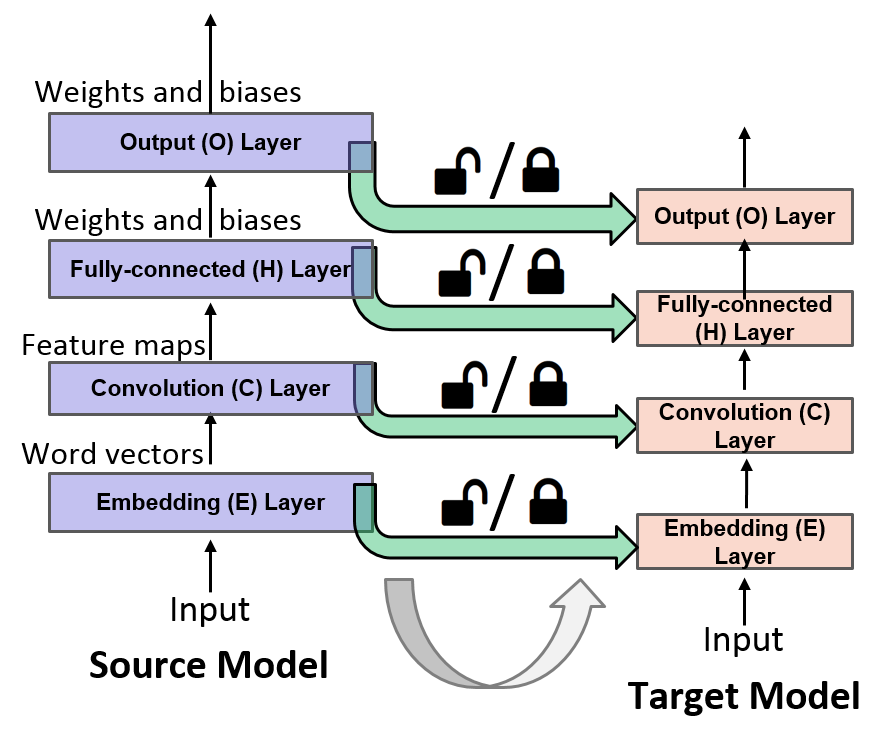
A Practitioners' Guide to Transfer Learning for Text Classification using Convolutional Neural Networks
Tushar Semwal, Promod Yenigalla, Gaurav Mathur, Sumit Bose Nair
SIAM International Conference on Data Mining (SDM) 2018 84 citations
How much of a CNN trained on one text domain transfers to another — and which layers should you freeze? This practitioner's guide runs systematic experiments across layer depth, fine-tuning strategies, and hyperparameters, delivering concrete rules of thumb for real NLP pipelines. Originated from work at Samsung Research; 84 citations and still a go-to reference for applied transfer learning.
A Practitioners' Guide to Transfer Learning for Text Classification using Convolutional Neural Networks
Tushar Semwal, Promod Yenigalla, Gaurav Mathur, Sumit Bose Nair
SIAM International Conference on Data Mining (SDM) 2018 84 citations
How much of a CNN trained on one text domain transfers to another — and which layers should you freeze? This practitioner's guide runs systematic experiments across layer depth, fine-tuning strategies, and hyperparameters, delivering concrete rules of thumb for real NLP pipelines. Originated from work at Samsung Research; 84 citations and still a go-to reference for applied transfer learning.
2017
On Ordering Multi-Robot Task Executions within a Cyber Physical System
Tushar Semwal, Shashi Shekhar Jha, Sumit Bose Nair
ACM Transactions on Autonomous and Adaptive Systems (TAAS) 2017 25 citations
When multiple robots share a workspace, wrong task ordering causes bottlenecks, collisions, and deadlocks. This paper formalises the scheduling problem in cyber-physical systems and proposes a distributed solution that balances workload without a central coordinator — validated on real robot hardware. Published in ACM TAAS, one of the top journals in autonomous adaptive systems.
On Ordering Multi-Robot Task Executions within a Cyber Physical System
Tushar Semwal, Shashi Shekhar Jha, Sumit Bose Nair
ACM Transactions on Autonomous and Adaptive Systems (TAAS) 2017 25 citations
When multiple robots share a workspace, wrong task ordering causes bottlenecks, collisions, and deadlocks. This paper formalises the scheduling problem in cyber-physical systems and proposes a distributed solution that balances workload without a central coordinator — validated on real robot hardware. Published in ACM TAAS, one of the top journals in autonomous adaptive systems.
2016
AgPi: Agents on Raspberry Pi
Tushar Semwal, Sumit Bose Nair
MDPI Electronics 2016 28 citations
Introduces AgPi, a lightweight mobile agent framework designed to run on Raspberry Pi devices. Demonstrates feasibility of deploying intelligent agents on resource-constrained hardware for IoT and cyber-physical system applications.
AgPi: Agents on Raspberry Pi
Tushar Semwal, Sumit Bose Nair
MDPI Electronics 2016 28 citations
Introduces AgPi, a lightweight mobile agent framework designed to run on Raspberry Pi devices. Demonstrates feasibility of deploying intelligent agents on resource-constrained hardware for IoT and cyber-physical system applications.
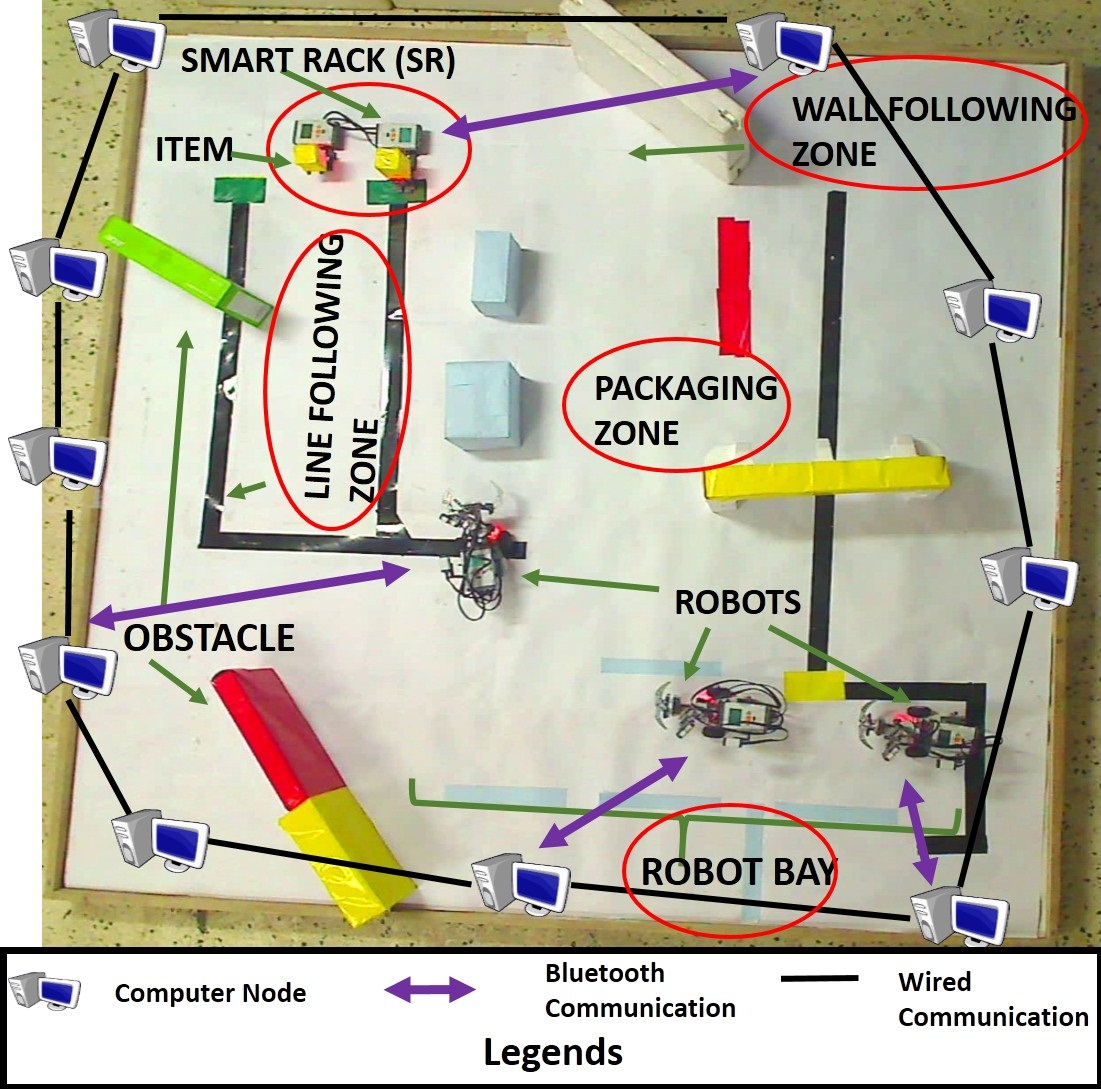
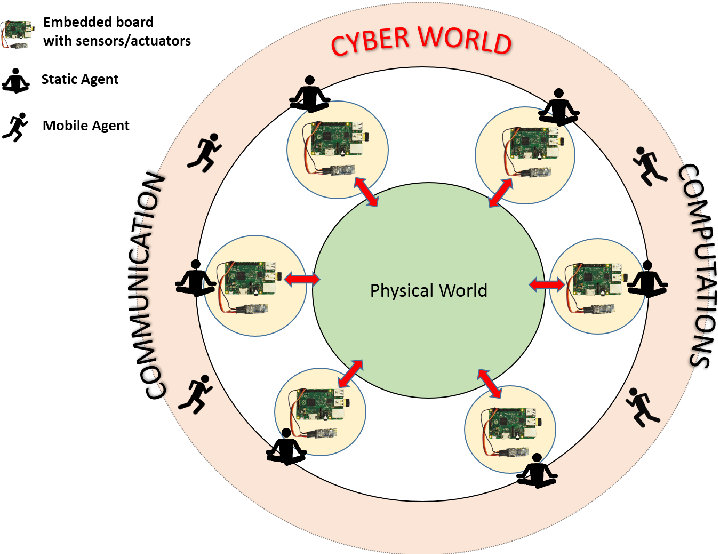
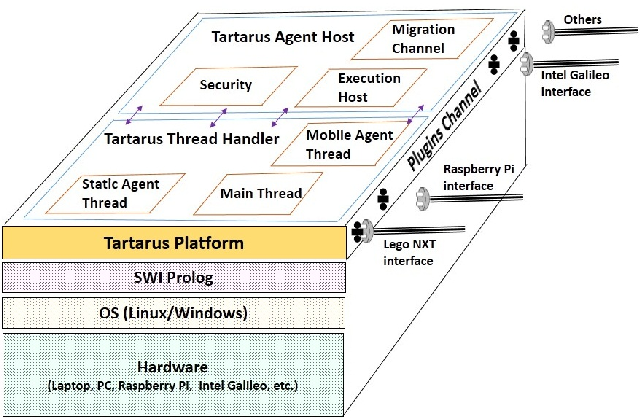
Tartarus: A Multi-Agent Platform for Bridging the Gap between Cyber and Physical Systems
Tushar Semwal, Nikhil S., Shashi Shekhar Jha, Sumit Bose Nair
International Conference on Autonomous Agents and Multi-Agent Systems (AAMAS) 2016 22 citations
Presents Tartarus, a multi-agent platform that bridges cyber and physical systems by enabling mobile agents to interact with physical devices and robotic actuators. Demonstrates the framework on distributed sensing and control scenarios.
Tartarus: A Multi-Agent Platform for Bridging the Gap between Cyber and Physical Systems
Tushar Semwal, Nikhil S., Shashi Shekhar Jha, Sumit Bose Nair
International Conference on Autonomous Agents and Multi-Agent Systems (AAMAS) 2016 22 citations
Presents Tartarus, a multi-agent platform that bridges cyber and physical systems by enabling mobile agents to interact with physical devices and robotic actuators. Demonstrates the framework on distributed sensing and control scenarios.
2015
Tartarus: A Multi-Agent Platform for Integrating Cyber-Physical Systems and Robots
Tushar Semwal, M. Bode, V. Singh, Shashi Shekhar Jha, Sumit Bose Nair
ACM Conference on Advances in Robotics (AIR) 2015 31 citations
Early publication introducing the Tartarus platform for integrating mobile agents with robotic and cyber-physical infrastructure. Demonstrates coordinated multi-robot task execution driven by agent-based control logic.
Tartarus: A Multi-Agent Platform for Integrating Cyber-Physical Systems and Robots
Tushar Semwal, M. Bode, V. Singh, Shashi Shekhar Jha, Sumit Bose Nair
ACM Conference on Advances in Robotics (AIR) 2015 31 citations
Early publication introducing the Tartarus platform for integrating mobile agents with robotic and cyber-physical infrastructure. Demonstrates coordinated multi-robot task execution driven by agent-based control logic.